



















I miejsce
Wiktor Nowak
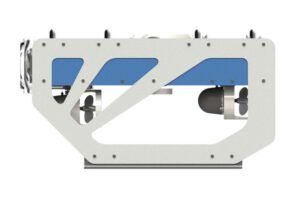
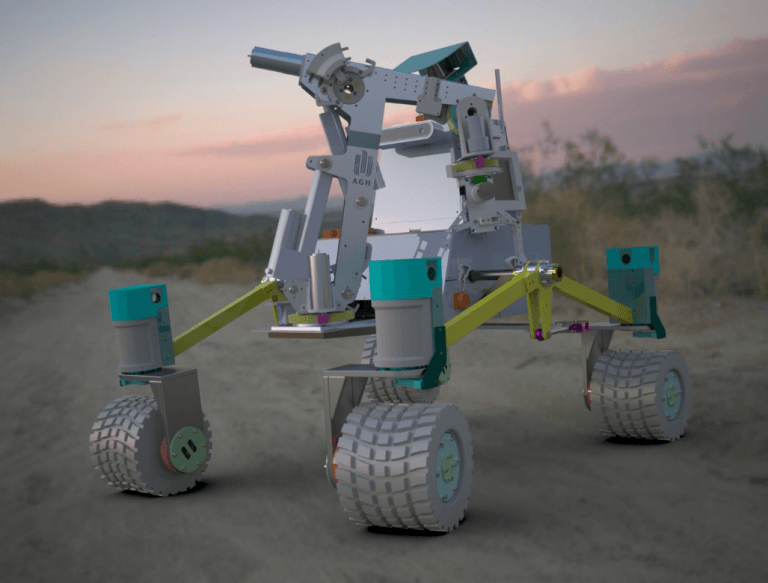
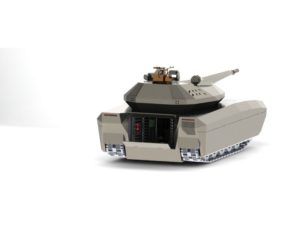
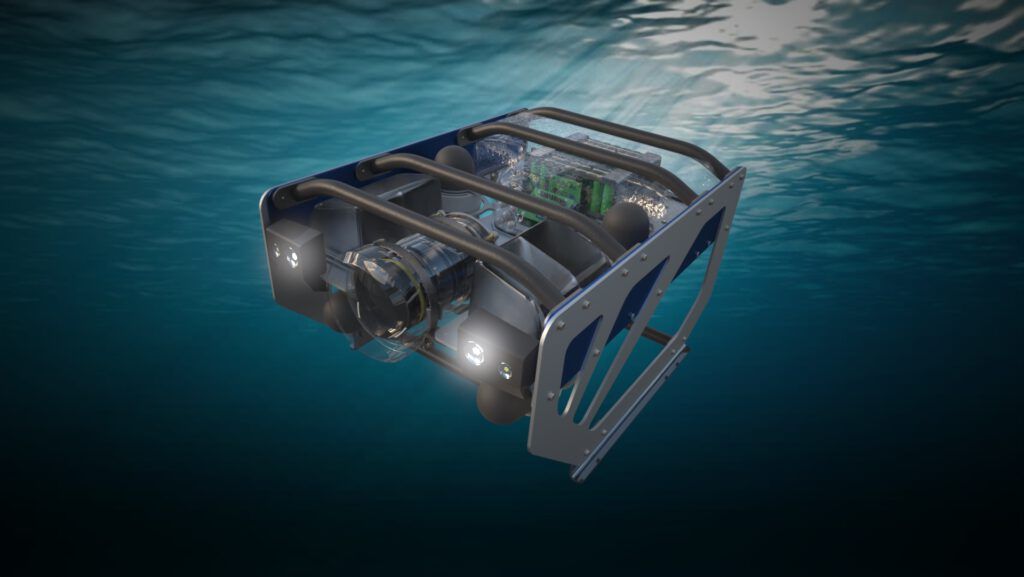
Projekt zakładał stworzenie modelu zdalnie sterowanego robota, służącego do inspekcji podwodnych konstrukcji. Robot powinien mieć niewielkie rozmiary, umożliwiające przeniesienie go przez jednego człowieka, a także być wyposażony w podstawowy sprzęt służący mu do wykonywania postawionego zadania, a więc kamerę lub aparat cyfrowy. Autor starał się zachować dbałość o najmniejsze detale przedstawiające konstrukcję takiego robota.
Wiktor Nowak